Sistema di monitoraggio di 360 gradi (360 AVM System)
Il conducente si trova sempre di fronte a questi problemi: quando si guida su un sentiero stretto, è difficile stimare l'intervallo di sicurezza per il passaggio; quando si parcheggia,il campo visivo dei riflettori del veicolo è molto limitato, anche l'auto con telecamera retrovisoria integrata, c'è ancora un punto cieco con l'immagine retrovisoria; quando si fa marcia indietro, alcuni piccoli e bassi ostacoli sono difficili da vedere attraverso lo specchio retrovisore,o rilevato dal radar per auto- Sì, signore.

Il 360° Around View Monitor System ((360 AVM System) aiuterà a risolvere questi problemi.per evitare che si verifichi una collisione.
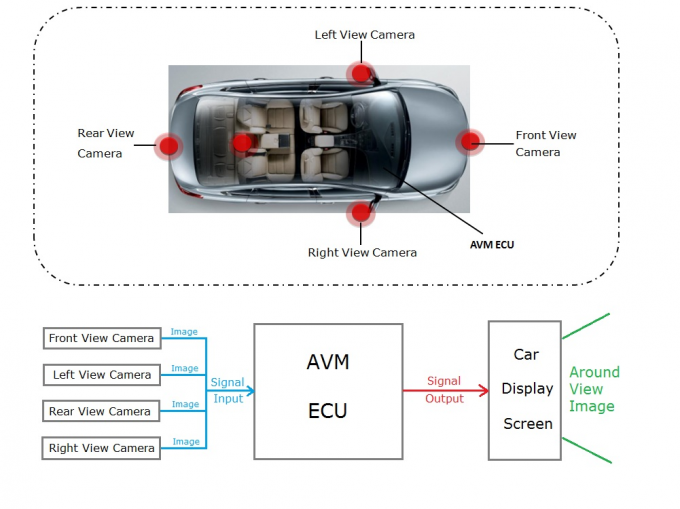
360° Around View Monitor System ((360 AVM System) è costituito da una unità di controllo elettronico (ECU) e quattro telecamere. L'ECU elaborerà le immagini catturate dai quattroapparecchi fotografici e poi in uscita sullo schermo dell'auto.
Funzione di base del sistema 360 AVM
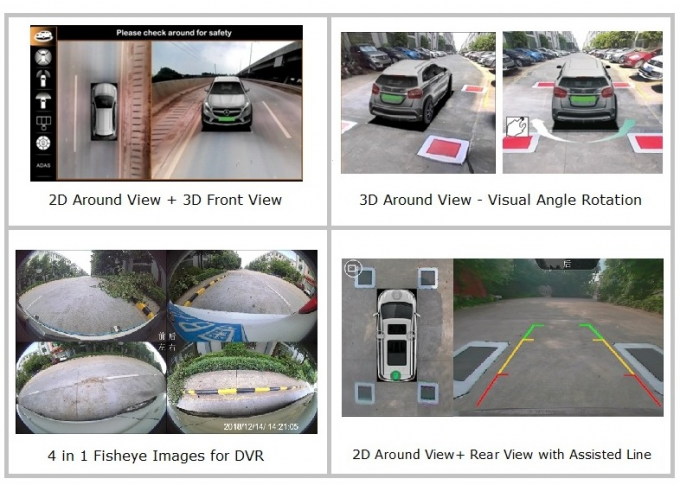
Io...2D Around View ((Range: davanti e dietro>3 metri,sinistra e destra>2 metri,splicing senza cuciture)
Io...Visualizzazione 3D intorno
Io...4 in 1 Fisheye Images per DVR
Io...Linea assistita statica o linea assistita dinamica per il parcheggio
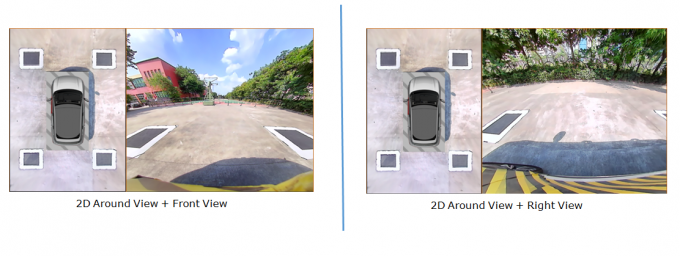
2) Display di immagine in direzione diversa
Il sistema può visualizzare immagini da diverse direzioni.
3) Visualizzazione 3D
Io...Visualizza la visione 3D intorno davanti, dietro, sinistra e destra.
Io...Visualizzazione dei turni in base ai cambi di marcia, al cambio di velocità, all'operatività del conducente, ai segnali di svolta, ecc.
Io...La vista può essere ruotata in 360°intorno alla macchina.
Io...Il modello di auto nel video cambierà direzione in base alla guida effettiva.

4) Cambiamento di vista
Il sistema cambierà visione in base ai segnali di svolta, ai cambi di marcia o al pulsante AVM sul controllo centrale dell'auto.
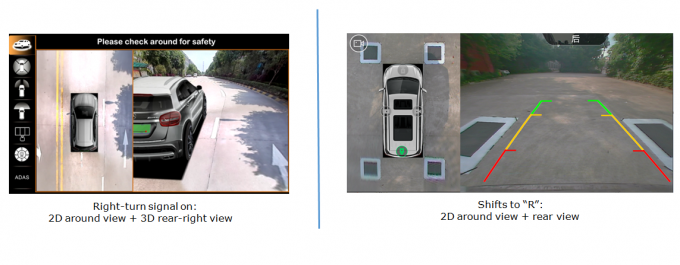
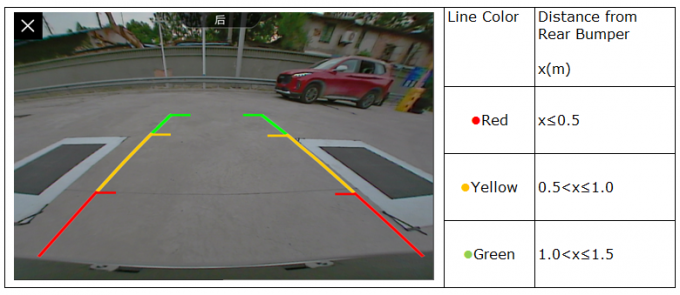
5) Linea assistita statica o linea assistita dinamica per il parcheggio
Quando il guidatore passa la marcia a "R", il sistema visualizza la vista 2D intorno e la vista posteriore.la linea assistita statica o la linea assistita dinamica verranno visualizzate per assistere il conducente nel parcheggio o nella marcia indietro;.
Oltre alla funzione di base, il sistema 360 AVM può essere implementato in piùADASausili di guida, tra cui:
1) Perspective di terra sotto l'auto (CandidTech Patenti esclusivi)
Questa funzione può mostrare il terreno intero, per aiutare il conducente a evitare le grandi buche e pietre in anticipo quando si guida fuoristrada.

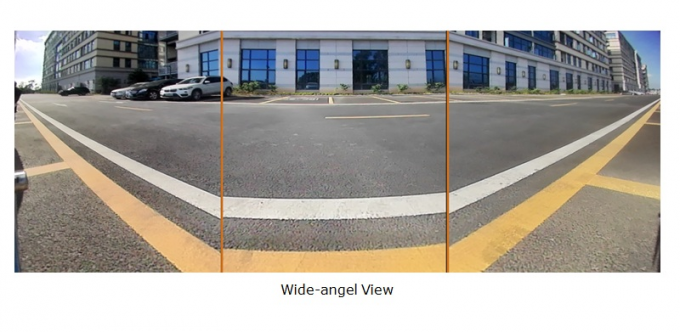
2) Vista a grande angolo
Il sistema può visualizzare la vista grandangolare in timmagine ripartita, la vista orizzontale è chiusa a200°.
3) Avvertimento a distanza da radar ad ultrasuoni
Il sistema AVM non è incluso nel radar, il veicolo devescherzato con il radar Oppure potremmo caricare il radar secondo le richieste del cliente.



4) Funzione DVR
Il sistema AVM può memorizzare i video dalle 4 telecamere e produrre un'immagine 4 in 1 per la funzione DVR.
scheda di archiviazione supportata: scheda TF, formato FAT32, massimo 32 GB.

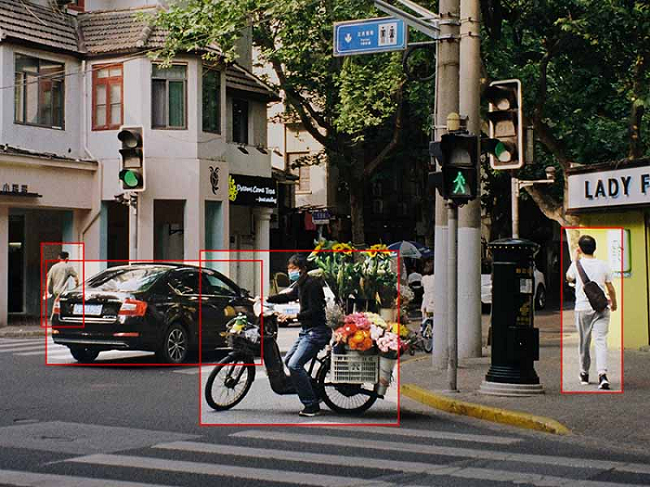
Detezione oggetti in movimento (MOD)
Quando si parcheggia o si avvia l'auto, attraverso itecnologia di riconoscimento magico,Il360 SIl sistema VM puòrilevare l'oggetto in movimento intorno alla macchina e avvertire il conducente di regolarecomportamento alla guida.
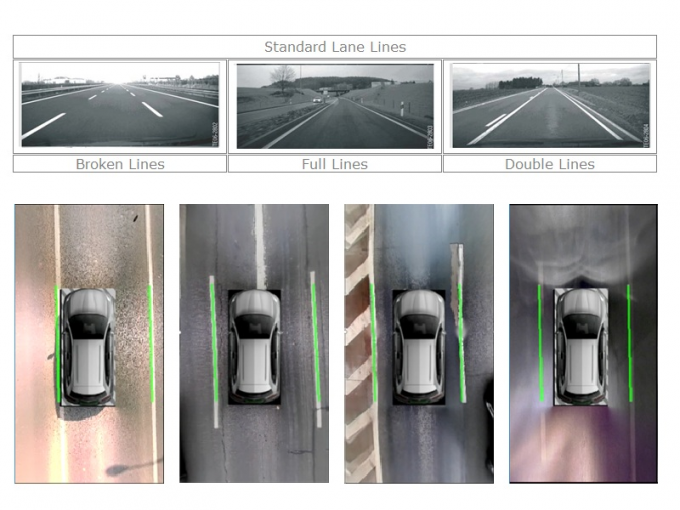
La stradaDAperturaWarningSIstem(LDWS)
Quando la velocità del veicolo è superiore a 50 km/h (velocità)personalizzabile), il sistema AVM identifica la linea di corsia standard in base alla sua visione in 2D.
Se il conducente èdeviaredidalla corsia originale incoscientely ((senza utilizzare il segnale di svolta), il sistemapuò dare un avvisosu0.5 secondi prima della partenza dalla corsia, per ricordare al conducenteper la partenza dalla corsiala posizione del veicolo, fornendo più tempo di risposta al conducente, riducendo notevolmente le collisioni causate dalla deviazione dalla corsia.
Commenti: tutte le funzioni di cui sopra possono essere scelte liberamente, la funzione di supporto del sistema personalizzazione.

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!